
arduino:mesurer_la_periode_d_un_pendule
Mesurer la période d'un pendule
Objectif
Mesurer la période T d'un pendule à l'aide d'un capteur à ultrasons et d'un Arduino relié au tableur Regressi par la liaison série.
Le montage
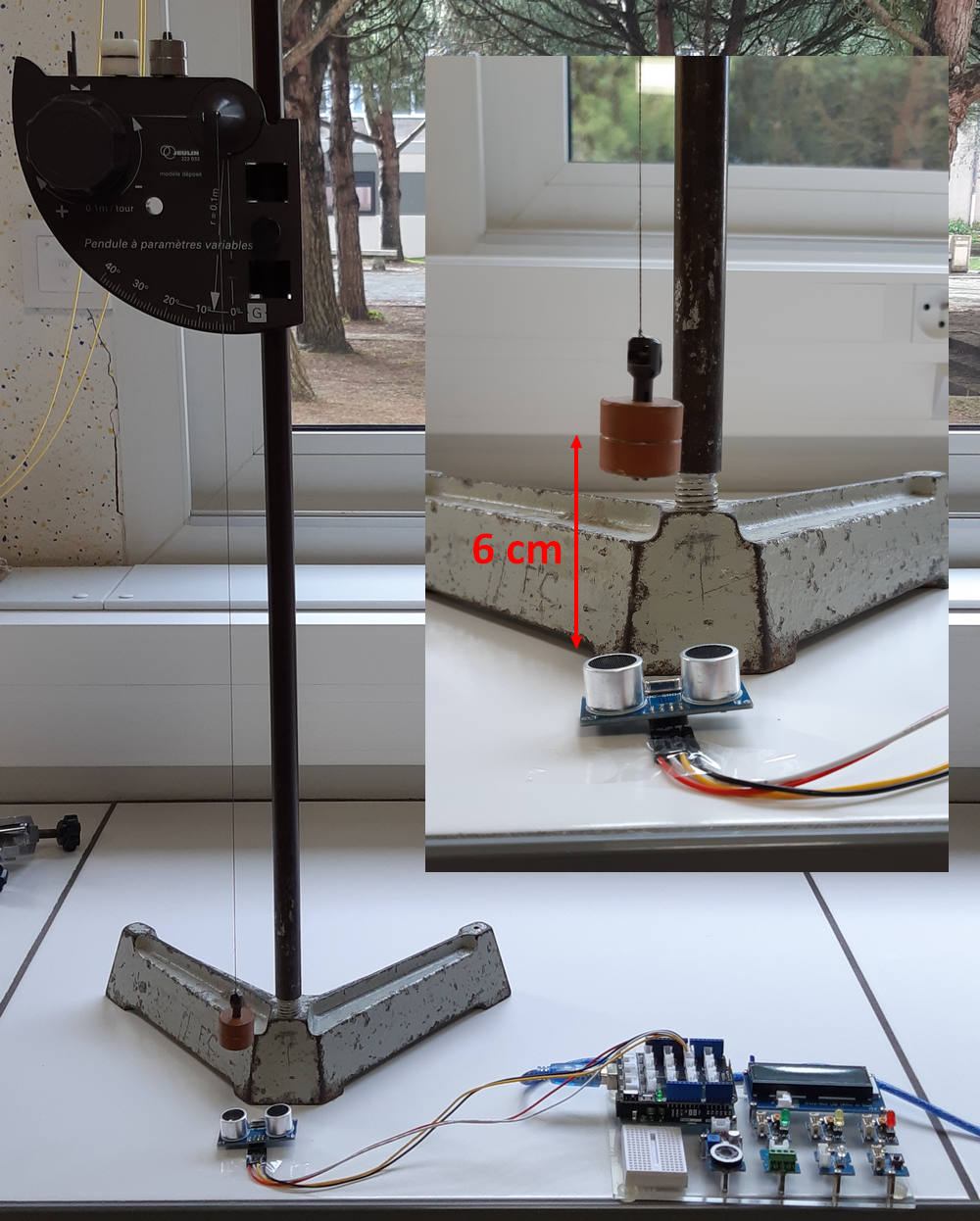
Conseils :
- laisser au moins 5 à 6 cm entre le capteur et le pendule.
- prendre un angle d'au moins 20°.
Le code
Le code est identique au code utilisé pour mesurer une distance à l'aide d'un capteur à ultrasons.
Acquisition des mesures avec Regressi
Il est possible d'acquérir les mesures directement dans Regressi avec une version récente (4.5.7).
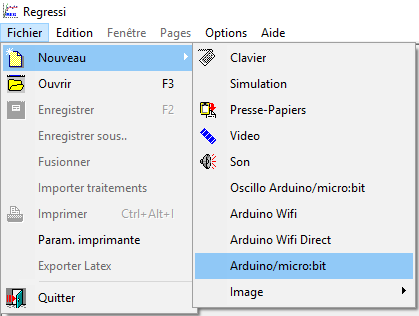
- Dans le menu Fichier → Nouveau → Arduino / micro:bit :
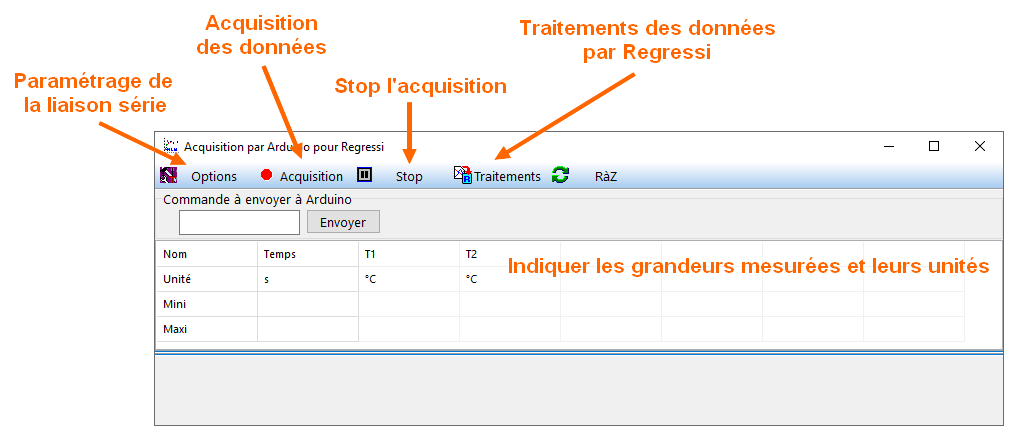
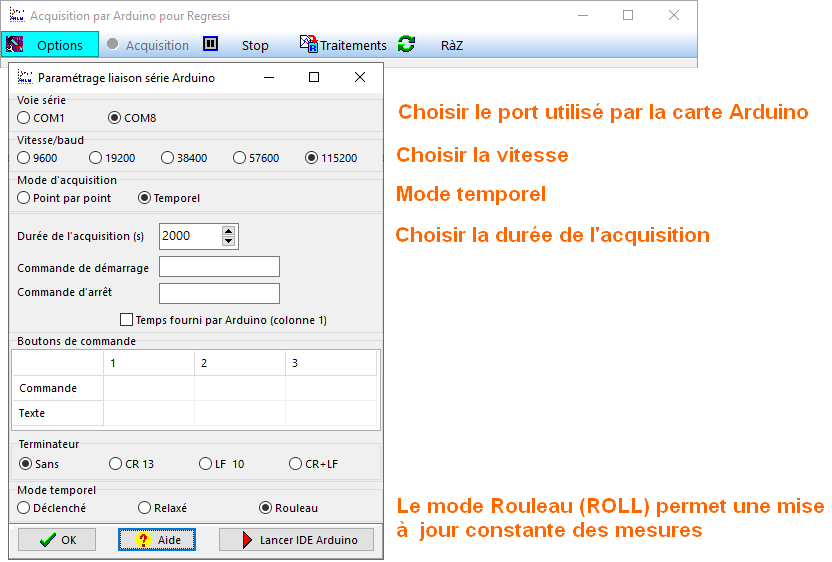
- Avec le bouton Options, régler les paramètres de la liaison série pour que Regressi communique avec la carte Arduino.
- Cliquer sur le bouton Acquisition pour obtenir les mesures. Le graphique s'affiche automatiquement.
- Cliquer sur Stop pour arrêter l'acquisition.
- Cliquer sur traitements pour envoyer les données dans Regressi.
Les mesures
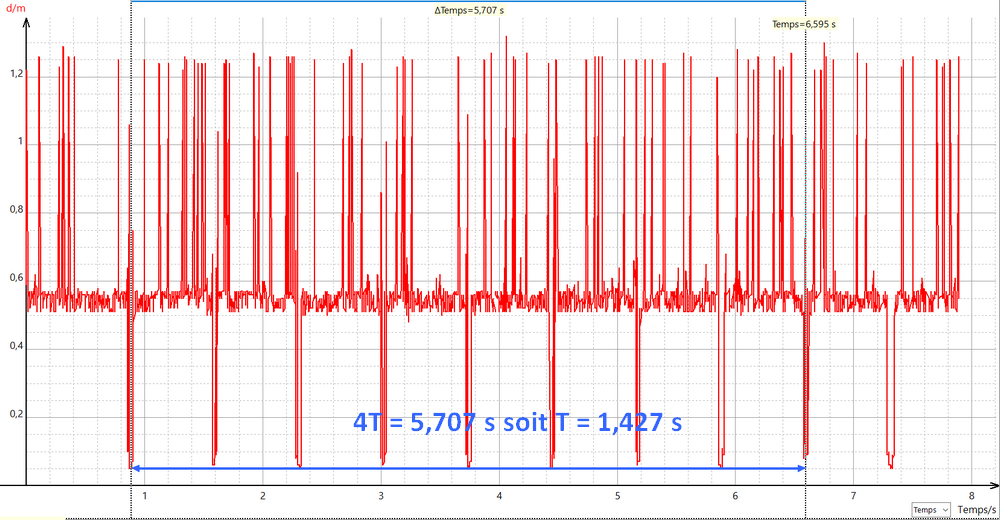
- Pour une longueur de fil du pendule de 50,0 cm (mesurée avec un mètre à ruban), la valeur théorique de la période est de T = 1,42 s.
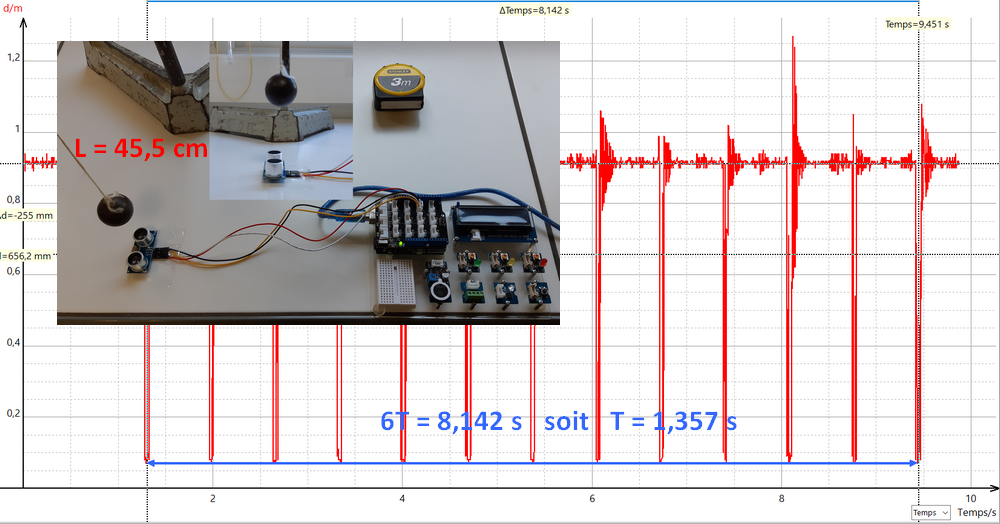
- Avec un pendule différent de longueur 45,5 cm. La valeur théorique de la période est de T = 1,35 s.
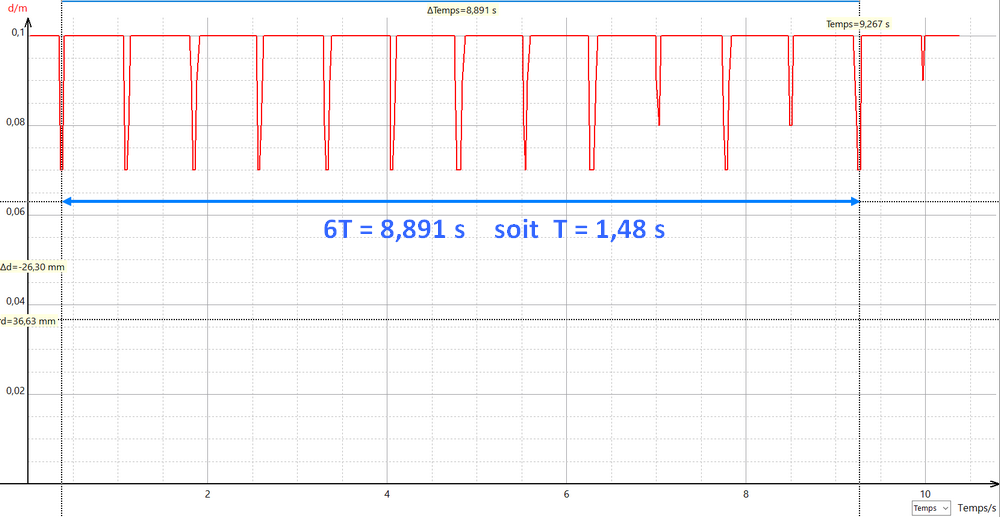
- Avec un pendule “fait maison”, de longueur 54 cm, constitué d'une boule de noël accrochée à une lampe halogène
 . La valeur théorique de la période est de T = 1,48 s. J'ai modifié le code Arduino pour supprimer les ondes perdues (d > 10 cm) afin d'obtenir un graphique un peu plus propre. Le résultat me semble très bon.
. La valeur théorique de la période est de T = 1,48 s. J'ai modifié le code Arduino pour supprimer les ondes perdues (d > 10 cm) afin d'obtenir un graphique un peu plus propre. Le résultat me semble très bon.
Statistiques du site
- Cette page a été consultée par 3 visiteurs aujourd'hui.
- Cette page a été consultée par 1776 visiteurs depuis le 02/01/2024.
arduino/mesurer_la_periode_d_un_pendule.txt · Dernière modification : de Stéphane LAURENT